


Содержание
Перейти к:
https://doi.org/10.21443/3034-1434-2023-1-1-41-50
Перейти к:
Дана характеристика физико-географических и социально-географических условий Арктической зоны Российской Федерации. Показана необходимость и возможности применения беспилотной техники для обеспечения территориальной активности в Арктике, определены критерии киберспособности пространства арктической территориальной активности по параметрам наблюдаемости, управляемости и безопасности. Приведены характеристики арктической беспилотной техники. Сформулированы закономерности формирования одиночных и групповых аэромобильных интеллектуальных платформ. Обоснованы цифровые технологии и способы применения беспилотных аэромобильных платформ в типовых эпизодах и задачах лоцманской проводки, освещения обстановки в районе, ледовой разведке, обеспечения связи и телекоммуникации в слабооборудованных акваториях, поддержки системы навигационного оборудования и др. Указаны ограничения аэромобильных арктических БПЛА-технологий.
Бенгерт А.А., Винокур М.В., Ежов Д.А., Биденко С.И. Технологии использования цифровых аэромобильных киберфизических платформ в Арктике. Арктика и инновации. 2023;1(1):41-50. https://doi.org/10.21443/3034-1434-2023-1-1-41-50
Bengert A.A., Vinokur M.V., Yezhov D.A., Bidenko S.I. Arctic digital airmobile cyberphysical platforms technologies. Arctic and Innovations. 2023;1(1):41-50. (In Russ.) https://doi.org/10.21443/3034-1434-2023-1-1-41-50
Арктическая зона Российской Федерации (АЗ РФ) является особым регионом России, обладает многими существенными факторами, определяющими его значимость для экономики и обороноспособности страны. Это природные ресурсы, инфраструктурный потенциал, условия для обеспечения национальной безопасности [1]. В этом районе сосредоточены значительные месторождения углеводородов (природный газ, нефть, уголь) и других полезных ископаемых [1]. По акваториям АЗ РФ Северного морского пути (СМП) осуществляются интенсивные морские перевозки сжиженного природного газа, нефти, других материалов и грузов. В акваториях АЗ РФ ведутся активные изыскания, научные исследования, прокладываются кабели и трубопроводы, бурятся скважины, решаются вопросы, связанные с обороной страны. В силу стратегической важности региона в акваториях СМП ведется интенсивное строительство новых терминалов, портов и других хозяйственных сооружений.
Все это требует усилий по обеспечению акватории Арктики и зон хозяйственной активности системами связи, навигации и освещения [2]. В связи со слабой оборудованностью АЗ РФ в качестве перспективных киберфизических решений рассматриваются системы беспилотных аэромобильных комплексов с высокой сенсорной способностью [3].
Территориальная активность в АЗ РФ затрудняется [1–3] как общими природно-социальными факторами арктической геосреды (ионизация атмосферы, низкие температуры, сильные ветры, недостаточная инсоляция, тяжелые подвижные льды, удаленность от промышленных центров, неразвитость инфраструктуры, демографические ограничения, высокая стоимость ресурсов и услуг, длительность восстановления нарушенных экосистем), так и специфическими негативными территориальными факторами (мелководность акватории, большая изменчивость рельефа дна из-за интенсивных выносов речного грунта, узость Морского канала, недостаточное навигационно-гидрографическое и гидрометеорологическое обеспечение, высокий уровень загрязнения акватории и прибрежной зоны).
Результаты многолетних исследований обобщены в форме таблицы. В таблице 1 приведены проблемные вопросы арктической территориальной активности, вытекающие из особенностей географии региона.
Анализ таблицы показывает, что перспективный в экономическом отношении регион требует определенных мер киберфизической поддержки различных видов деятельности в Арктике. К таким видам киберфизического обеспечения относятся следующие цифровые технологии [1–5]:
Формально эти требования формулируются следующим образом (рис. 1). Система (пространство) арктической территориальной активности (AASp) будет наблюдаемой, управляемой и безопасной (т.е. будет иметь кибертехнические предпосылки для функционирования и решения возложенных задач) тогда и только тогда, когда:
⇔ CSp ≠ ∅, NSp ≠ ∅, MSp ≠ ∅,
CSp ⋂ NSp ⋂ MSp ≠ ∅. (1)
В работах [4][5][8] показано, что исходя из сложности (точнее сказать, тяжести) физико-географических и социально-географических условий АЗ РФ для удовлетворения требований системы уравнений (1) к киберфизическому подпространству АЗ РФ:
1) в слабооборудованных и удаленных акваториях и районах могут быть использованы беспилотные аэромобильные киберфизические платформы (беспилотники) с размещенными на них геосенсорами (датчиками дистанционного зондирования Земли и системами наблюдения, средствами связи, навигационными приборами);
2) эти аэромобильные киберфизические платформы должны быть в максимальной степени роботизированы для обеспечения их процедурной автономности при решении задач обеспечения арктической территориальной активности (АТА).
Следует ли считать эти рекомендации умозрительными заключениями, или в настоящее время уже существуют образцы аэромобильных киберплатформ, которые уже сейчас могут функционировать в сложных условиях АЗ РФ и удовлетворять (в той или иной степени) требованиям системы (1)?
Анализ многочисленных разнообразных образцов отечественной и зарубежной беспилотной воздушной техники [6–8] показывает:
а) в принципе такая техника (авионика и геосенсоры) существует, но...
б) это в основном импортные воздушные агрегаты или отечественная техника с большим процентным составом зарубежного оборудования;
в) заявляемые пределы полетов по силе ветра 16–17 м/с в действительности оказываются гораздо меньше: 9–10 м/с.
Как исключение из правил можно отметить, что в настоящее время все же существуют отдельные образцы удовлетворительной беспилотной техники. Например, отечественный беспилотник в исполнении «по-самолетному» и «самолет вертикального взлета и посадки» с пределом ветровой нагрузки до 25 м/с. Это самолеты АО «НЦ ПЭ» «Археон» и «Археон-ВВП» (рис. 2–4).
Тактико-технические характеристики этих беспилотников (табл. 2, 3, рис. 4) показывают, что данные аппараты содержат в себе значительный потенциал для формирования требуемого киберфизического подпространства (области) Арктической зоны.
Беспилотник штатно несет отечественную РЛС — трехдиапазонный радиолокатор с синтезируемой апертурой (РСА), характеристики которого приведены в таблице 4.
На рисунке 5 приведен базовый состав сенсоров и оборудования аэромобильной киберфизической платформы.
Возможности и свойства указанных БПЛА апробированы и позволяют применять их в качестве роботизированных киберплатформ в следующих территориальных технологиях и тактических эпизодах:
А. Лоцманская проводка (лидирование) судна организацией аэромобильного створа группой глиссад-коптеров (рис. 6). Стая коптеров осуществляет круговое циклическое барражирование впереди судна, организует перемещающийся по проложенному маршруту аэромобильный оптический створ. Сами коптеры координируются береговым центром управления или лоцманом с борта судна.
Б. Дублирование средств навигационного оборудования (СНО) — временная замена собой вышедших из строя плавучих и стационарных средств навигационного оборудования (буи, бакены, створные знаки, огни, маяки). Коптеры — дублеры СНО оперативно прибывают в район расположения СНО, осуществляют внешний оптический и, если необходимо, радиолокационный осмотр, передают данные в центр управления все время устранения неисправности.
В. Автономная работа стаей при комплексном многопараметрическом освещении обстановки в регионе. Беспилотник по массе и габаритам лимитирован для размещения на нем геосенсоров и другого оборудования.
Датчики и техника дистанционного зондирования размещаются на нескольких коптерах, которые совместно и согласованно осуществляют измерения и наблюдения в обследуемой локации, передают данные наблюдения на коптер-ретранслятор или доставляют их на землю по окончании работ.
Г. Автономная работа стаей коптеров при оперативном вскрытии обстановки по одному параметру в обширной рабочей зоне. Линейка коптеров с одинаковыми геосенсорами одновременно осуществляет измерения одинаковыми датчиками в различных точках или локациях обследуемого района.
Пример — гидрографический промер акватории линейным строем коптеров (расположены в линию перпендикулярно генеральному курсу промера), перемещающихся все сразу в одинаковом направлении
Д. Аэромобильный терминал для передачи на борт судна навигационно-гидрографической и гидрометеорологической информации, рекомендаций и другой служебной информации. Чтобы не устанавливать на суда дополнительное оборудование (например, навигационную аппаратуру пользователей наземных мобильных радионавигационных систем), на борт судна может быть отправлен коптер-терминал, который доводит до судоводителя необходимую информацию (например, координаты самого коптера, определенные с помощью радиолокационного визирования с берега или наземной РНС).
В приполярной зоне довольно часто возникают возмущения электромагнитного поля (табл. 1), которые искажают слабые сигналы спутниковых навигационных систем (СНС). Сигналы СНС в Арктике подвержены помехам и от других источников электромагнитного излучения. Поэтому судовладельцы требуют от гидрографической службы организации в АЗ РФ альтернативных высокоточных систем навигации — АВНС [7][8]. Это обстоятельство, в свою очередь, вызывает необходимость штатного доукомплектования судов дополнительной аппаратурой пользователей АВНС. Плюс эта аппаратура должна получить сертификат Российского морского регистра судоходства. Аэромобильные коптеры-терминалы как раз и предназначены для решения этой проблемы.
Е. Режим ретрансляции. Длительное посменное (вахтовое) обеспечение связи и телекоммуникации (рис. 7) в районе (акватории). При необходимости наряд коптеров в режиме ретранслятора осуществляет посменное (вахтовое) барражирование в обслуживаемом районе (акватории).
Ж. Мониторинг ледовой обстановки в ближней зоне ледокола (100–150 км) для вскрытия ледовой обстановки, обеспечения ледовых прогнозов, планирования маршрута перехода во льдах и поддержки ледовых проводок. Следует отметить, что эпизоды Б, В, Г требуют организации локализованного применения нескольких единиц коптеров одновременно, что означает формирование некоей групповой роботизированной киберфизической аэромобильной платформы.
Опытная эксплуатация и поисковые исследования по вопросам применения аэромобильных киберфизических платформ в Арктике показывают следующие организационные и технические вопросы, которые следует учитывать при эксплуатации мобильных роботизированных комплексов в АЗ РФ:
Таблица 1. Природные и хозяйственные факторы Арктической зоны, оказывающие влияние на территориальную арктическую активность
Table 1. Natural and Economic Factors of the Arctic Zone Influencing Territorial Arctic Activity
Территориальные факторы Арктической зоны Российской Федерации | Вытекающие из специфических условий региона проблемные вопросы арктической территориальной активности |
Физико-географические условия: Большая пространственная протяженность Значительные запасы полезных ископаемых Низкие температуры Высокая влажность Длительная полярная ночь Ионизация атмосферы приполярной области, создающая значительные по пространственному распространению (500–1500 км) и времени (до 2-х часов) помехи (вплоть до полного прекращения) прохождению радиоволн Мелководность акватории морской арктической зоны Сильные ветры Низкая инсоляция Ледовитость, тяжелые подвижные льды Недостаточная навигационная оборудованность Низкая изученность региона Изменчивость рельефа дна вследствие мощных выносов грунта сибирских северных рек Длительность восстановления нарушенных экосистем | Необходимость преодоления больших расстояний в условиях недостаточно эффективной связи, навигационно-гидрографического и гидрометеорологического обеспечения. Необходимость оперативной ледовой разведки, прогнозирования ледовой обстановки, планирования маршрутов перехода и ледовых проводок в условиях подвижных ледовых полей. Наличие протяженных зон помех прохождению радиоволн. Необходимость особого арктического исполнения аппаратной части технических средств и систем. Необходимость наращивания группировки бортовых/базовых беспилотных комплексов и систем ледовой разведки и гидрографических обследований. Необходимость производства периодических дноуглубительных работ. Необходимость наращивания навигационно-гидрографического оборудования. Необходимость развертывания альтернативных спутниковым высокоточных навигационных систем. Необходимость интеграции спутниковых и наземных навигационных систем. Необходимость обмена информацией об обстановке в ближней зоне судов. Необходимость наращивания группировки бортовых беспилотных аппаратов: навигационных, гидрографических, разведывательных (воздушных, подводных). Необходимость систематических точных оперативных и долгосрочных метео- (ледовых) прогнозов. Необходимость дополнения спутниковой связи и навигации наземными связными и радиотехническими системами. Необходимость насыщения региона киберфизическими средствами и системами поддержки территориальной арктической активности. Необходимость ледокольной поддержки навигации |
Хозяйственно-географические условия: Неразвитость инфраструктуры: · транспортной · энергетической · селитебной · телекоммуникационной · связной · логистической · здравоохранения · НГГМО · спасательной Удаленность от экономически активных регионов России Демографические ограничения Высокая стоимость ресурсов и услуг (людских, биологических, энергетических, транспортных) |
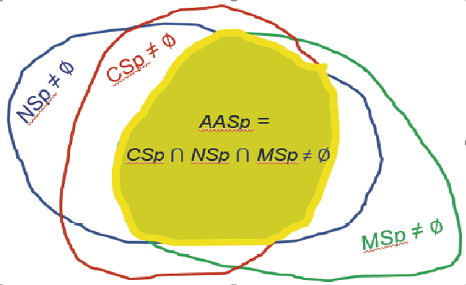
Рис. 1. Иллюстрация киберфизического пространства системы арктической территориальной активности
Fig. 1. Illustration of the Cyber-Physical Space of the Arctic territorial activity system

Рис. 2. БПЛА «Археон» на стартовой катапульте
Fig. 2. Archeon unmanned aerial vehicle on a catapult launcher

Рис. 3. БПЛА «Археон-ВВП» осуществляет стартовый подъем на электромоторах
Fig. 3. The Archaeon-VTOL UAV performs a launch ascent on electric motors
Таблица 2. Тактико-технические характеристики БПЛА «Археон»
Table 2. Tactical and technical characteristics of the Archeon UAV
Параметр | Значение |
Время полета | до 10 часов |
Скорость полета | 70–140 км/ч |
Тип двигателя | бензиновый 4-тактный |
Компоновка двигателя | тянущий |
Максимальной радиус действия радиолинии | до 150 км |
Максимальный радиус действия видеоканала аналоговый цифровой | до 30 км до 50 км |
Максимальная дальность полета | до 1000 км |
Взлетный вес | до 27 кг |
Полезная нагрузка | до 7 кг |
Размах крыла летательного аппарата | 3 м |
Рабочая высота полета | от 100 до 5000 м |
Взлет | с катапульты |
Посадка | по-самолетному |
Условия эксплуатации: | |
· ветер | до 20 м/с |
· температура окружающего воздуха | –40…+50 °С |
· умеренный дождь и снегопад | да |

Рис. 4. При стартовом подъеме БПЛА маршевый двигатель внутреннего сгорания не работает
Fig. 4. During the initial ascent of the UAV, the main internal combustion engine does not work
Таблица 3. Тактико-технические характеристики БПЛА «Археон-ВВП»
Table 3. Tactical and technical characteristics of the Archeon-VTOL UAV
Параметр | Значение |
Время полета | до 3 часов |
Скорость полета | 70–110 км/ч |
Тип двигателя | Комбинированная силовая установка ДВС + электро |
Компоновка двигателя | тянущий |
Максимальной радиус действия радиолинии | до 150 км |
Максимальный радиус действия видеоканала аналоговый цифровой | до 30 км до 50 км |
Максимальная дальность полета | до 500 км |
Взлетный вес | до 28 кг |
Полезная нагрузка | до 3,5 кг |
Размах крыла летательного аппарата | 3 м |
Рабочая высота полета | от 100 до 3000 м |
Взлет | вертикальный |
Посадка | вертикальный |
Условия эксплуатации: | |
· ветер | до 25 м/с |
· температура окружающего воздуха | –40…+50 °С |
· умеренный дождь и снегопад | да |
Таблица 4. Характеристики носимого беспилотником радара с синтезируемой апертурой
Table 4. Characteristics of a Drone Portable Synthetic Aperture Radar
Диапазон РСА | Характеристики диапазона РСА |
«РСА-МГ-Х» — РСА малогабаритный Х-диапазона | X-диапазон (λ = 3 см) Диапазон частот — 9,3–9,8 ГГц Разрешающая способность изображения — 0,5×0,5 м Масса аппаратного блока — 1,6 кг Масса антенны — 0,18 кг Габариты антенны 200×100×20 мм Ширина ДН антенны — 8×16 градусов Обеспечивает обзорное РЛ-освещение внешней обстановки (лед, суда, береговые объекты и т.д.). Изображение высокой четкости, сигнал отражается от поверхности; обзор на поверхности |
«РСА-МГ-L» — радиолокатор с синтезированной апертурой (РСА) малогабаритный L-диапазона | L-диапазон (λ = 24 см) — сигнал проникает под поверхность льда и земли Диапазон частот — 1215–1290 МГц Разрешающая способность изображения — 2×2 м Масса аппаратного блока — 1,6 кг Масса антенны — 0,7 кг Габариты антенны 800×200×40 мм Ширина ДН антенны — 15×70 градусов |
«РСА-МГ-LХ» — РСА Совмещенный малогабаритный двухчастотный радиолокатор | P-диапазон (λ = 70 см) — сигнал проникает под поверхность льда и земли более глубоко (2–3 λ) Масса аппаратного блока — 2,5 кг Масса антенн — 1 кг |
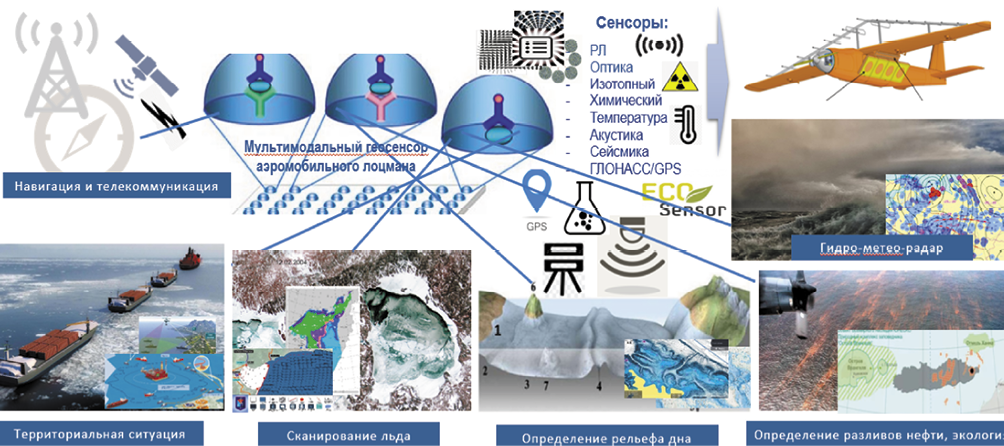
Рис. 5. Состав оборудования аэромобильной киберфизической платформы (концептуально)
Fig. 5. Equipment composition of an aeromobile cyberphysical platform (schematically)
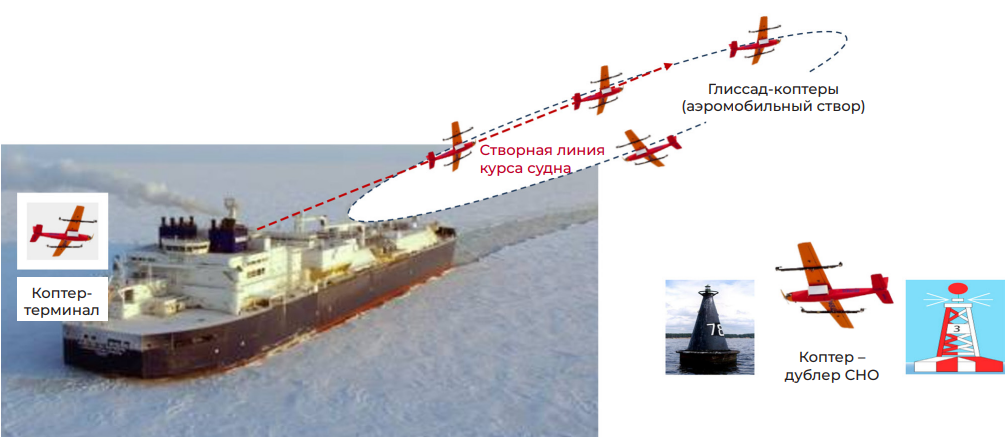
Рис. 6. Типовые эпизоды применения роботизированных аэромобильных платформ: проводка (лидирование судна), дублирование СНО, терминальная передача служебной информации на судно
Fig. 6. Typical situations of applying robotic air mobility platforms: ship tracking (vessel leading), duplication of navigation aids, terminal transfer of service information to the vessel
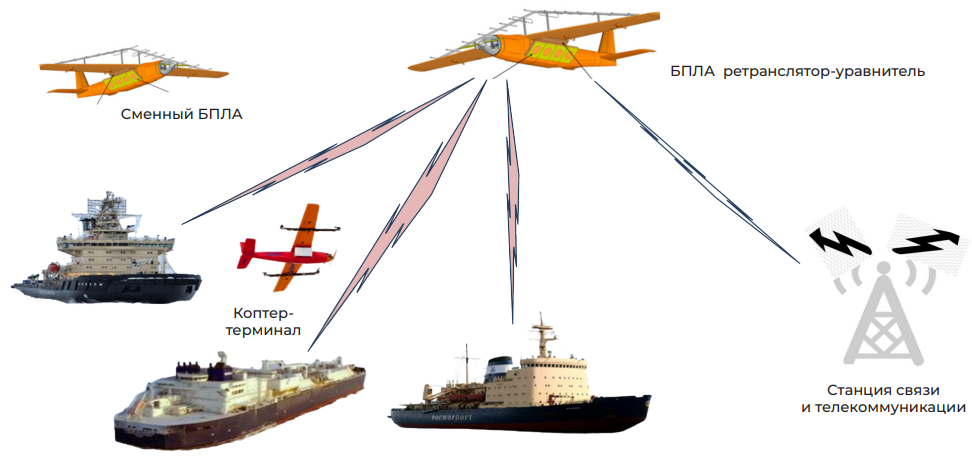
Рис. 7. Режим ретрансляции в слабооборудованных акваториях АЗ РФ
Fig. 7. Retransmission mode in poorly equipped water areas of the Arctic Zone of the Russian Federation
Проведенный анализ позволяет сделать вывод, что для поддержки территориальной деятельности могут быть использованы аромобильные киберфизические платформы, с помощью которых в слабооборудованных акваториях и районах АЗ РФ реализуются следующие цифровые технологии:
1. Ивантера В.В., ред. Арктическое пространство России в XXI веке: факторы развития, организация управления. СПб.: Издательский дом «Наука»; 2019.
2. Биденко С.И., Храмов И.С., Бенгерт А.А., Мучкаева И.С. Геоинформационная процедура оценки региональной ситуации на основе оперативного ИНС-анализа гидрометеорологической и экологической информации (на примере Обской губы). Гидрометеорология и экология. 2022;(68):508–524. https://doi.org/10.33933/2713-3001-2022-68-508-524
3. Тимофеев О.Я., Таровик О.В., Топаж А.Г., Миронов Е.У., Фролов С.В., Буянов А.С., Горбачев М.А., Бенгерт А.А. Концепция централизованной информационной системы для планирования работы флота в Арктике. Арктика: экология и экономика. 2019;(1):129–143. https://doi.org/10.25283/2223-4594-2019-1-129-143
4. Биденко С.И., Бенгерт А.А., Мучкаева И.С., Николашин Д.Ю., Щесняк С.С. Робототехнические аэромобильные системы поддержки территориальной активности в арктической зоне Российской Федерации. Морская радиоэлектроника. 2022;(1):10–16.
5. Панамарев Г.Е., Биденко С.И. Геоинформационная поддержка управления сложными территориальными объектами и системами. Новороссийск: МГА; 2011.
6. Силкин А.А., Бенгерт А.А., Биденко С.И. и др., Щесняк С.С., рук. Обоснование направлений построения и использования аэромобильных робототехнических киберплатформ в интересах обеспечения арктической территориальной хозяйственной активности: отчет по КНИР «Аэролоцман-2.9». СПб.: Изд-во АО НЦ ПЭ; 2022.
7. Шаповалов А.Б., Щербинин В.В., Свиязов А.В., Кветкин Г.А., Измайлов-Перкин А.В., Зиновьев П.Д., и др. Создание автономной системы для безопасного и надежного судовождения в критически сложных зонах Обской губы. Оборонно-промышленный потенциал. 2019;(4):30–41.
8. Миляков Д.Ф., Николашин Ю.Л., Щесняк С.С., Биденко С.И., Присяжнюк С.П., Черный С.Г. Направления организации альтернативного радионавигационно-телекоммуникационного обеспечения судоходства в арктической морской зоне. Информация и Космос. 2020;(3):102–111.
Санкт-Петербург
Санкт-Петербург
Санкт-Петербург
Санкт-Петербург
Бенгерт А.А., Винокур М.В., Ежов Д.А., Биденко С.И. Технологии использования цифровых аэромобильных киберфизических платформ в Арктике. Арктика и инновации. 2023;1(1):41-50. https://doi.org/10.21443/3034-1434-2023-1-1-41-50
Bengert A.A., Vinokur M.V., Yezhov D.A., Bidenko S.I. Arctic digital airmobile cyberphysical platforms technologies. Arctic and Innovations. 2023;1(1):41-50. (In Russ.) https://doi.org/10.21443/3034-1434-2023-1-1-41-50
Федеральное государственное автономное образовательное учреждение высшего образования "Мурманский арктический университет» (ФГАОУ ВО «МАУ»)
ул. Спортивная, 13, г. Мурманск, Россия, 183010
E-mail: arcainnov@mauniver.ru










